MTPtg Configuration for MTRotator and MTMount¶
Overview¶
This document provides step-by-step instructions for reconfiguring the MTPtg CSC of the Simonyi Telescope when either the MTRotator and/or MTMount components are unavailable. These changes are typically needed during hardware failures, maintenance, or subsystem testing when continued tracking or telemetry is still desired.
In such non-standard operational conditions, it’s possible to adjust the MTPtg configuration to prevent the system from entering a FAULT state, thereby allowing continued tracking using the remaining functional components.
The procedures outlined include:
Transitioning the MTPtg CSC to
STANDBYmode.Modifying configuration files within the MTPtg pod to reflect the current hardware availability.
Restarting the MTPtg CSC to apply the new configuration.
Important Information before start.
Warning
Only proceed if you are authorized to modify the MTPtg configuration of the Simonyi Telescope.
Warning
Commissioning Scientists (ComSci) or Observing Specialist (OS) with the ArgoCD training and authorized on shift can change the version of MTMount CSC in ArgoCD to mtmount-ccw-only. This configurations can deal with tracking without said component.
Note
Kubernetes authorization
To execute this procedure, you must have the necessary credentials installed to access the Kubernetes cluster. Refer to the instructions for Kubernetes.
Precondition¶
MTRotator is not available, but you still want to track without the Rotator, using the rest of the components; or you want to include the Rotator in the tracking again.
MTMount is not available (not starting up, for example), but you still want to use the Camara Cable Wrap (CCW) + Rotator without moving or commanding the mount, or you want to revert the change and include the mount.
The MTMount CSC should be configured in the proper CSC version to be operational (only with the CCW component).
This is done by the ComSci or the OS in ArgoCD (Instructions for ArgoCD).
The MTMount will need to be set to
OFFLINEbefore switching the CSC version to mtmount-ccw-only.To check the CSC version in use, you can open ArgoCD (credentials in 1Password) and search for simoniyitel.
The figure shows this page, highlighting the Synced status indicating is in this state.
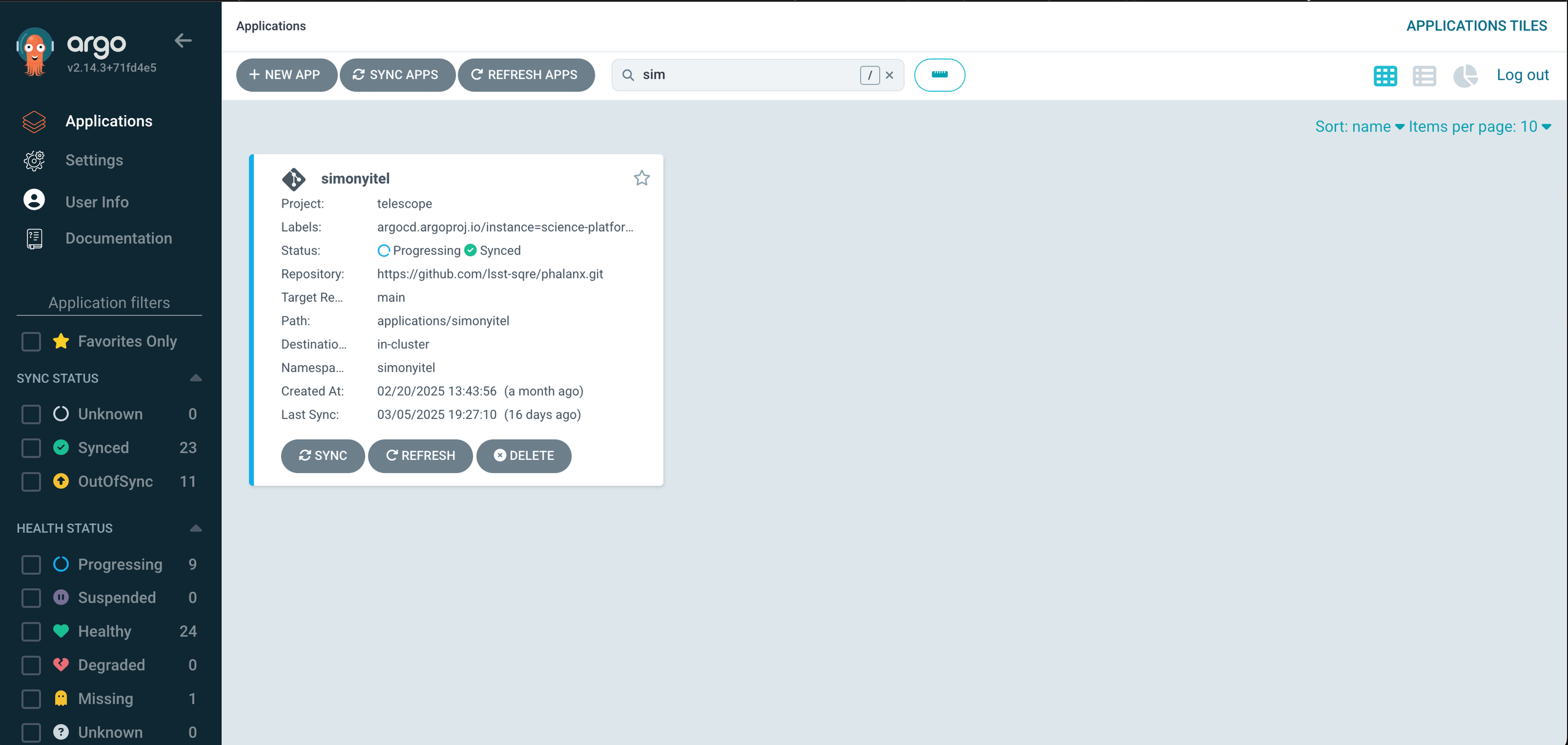
Fig1. You search “simonyitel” and then click it.¶
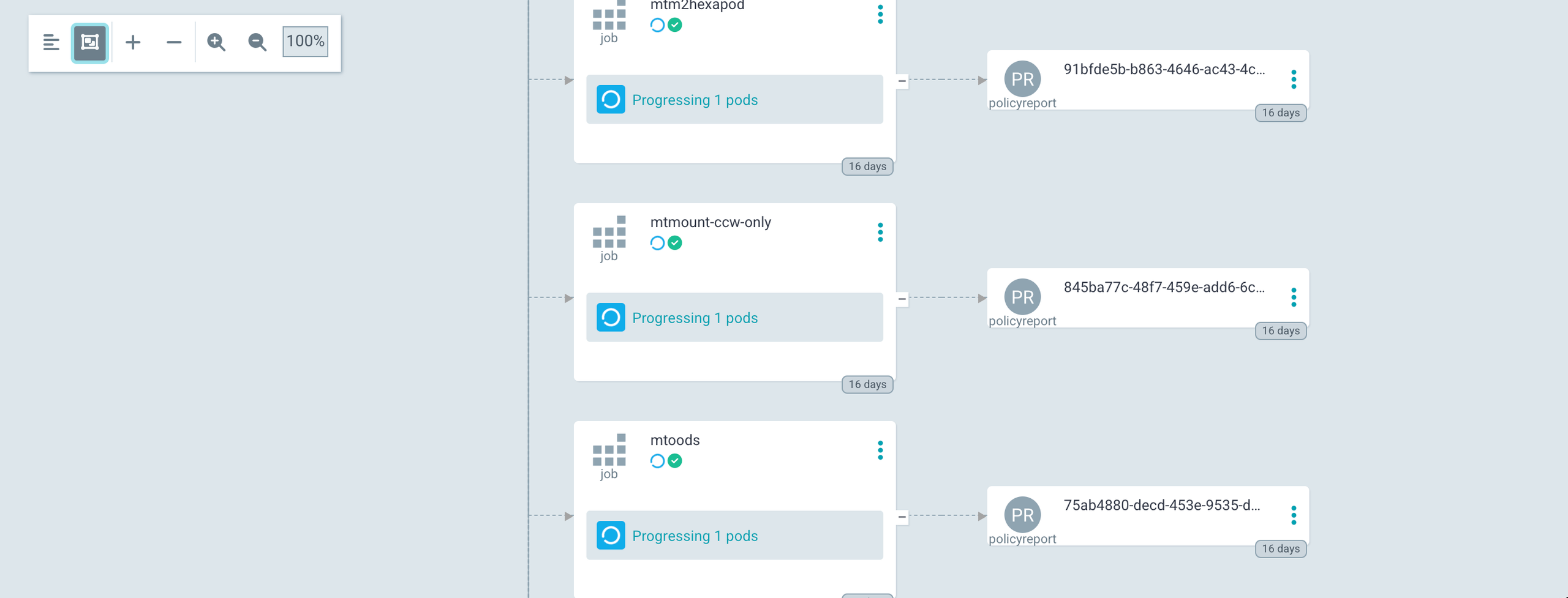
Fig2. You can find “mtmount-ccw-only” job when you scroll down.¶
Procedure Steps¶
Steps¶
Announce through the Slack channel #summit-simonyi that the component is not available, and you are about to change the configuration.
Issue the
set_summary_state.pyscript in LOVE to change the status of MTPtg toSTANDBYwith the following configurationset_summary_state.py¶data: - - MTPtg - STANDBY
Find the name of the pod where the MTPtg is running.
From your terminal, run the following command which list all the pods related to the simonyitel :
kubectl --kubeconfig=${HOME}/.kube/yagan.yaml get pod -o=custom-columns=NAME:.metadata.name,STATUS:.status.phase,NODE:.spec.nodeName -n simonyitelIf you get a command_not_found, you first need to set up the access to Kubernetes. Follow the instructions for Kubernetes in step #4.
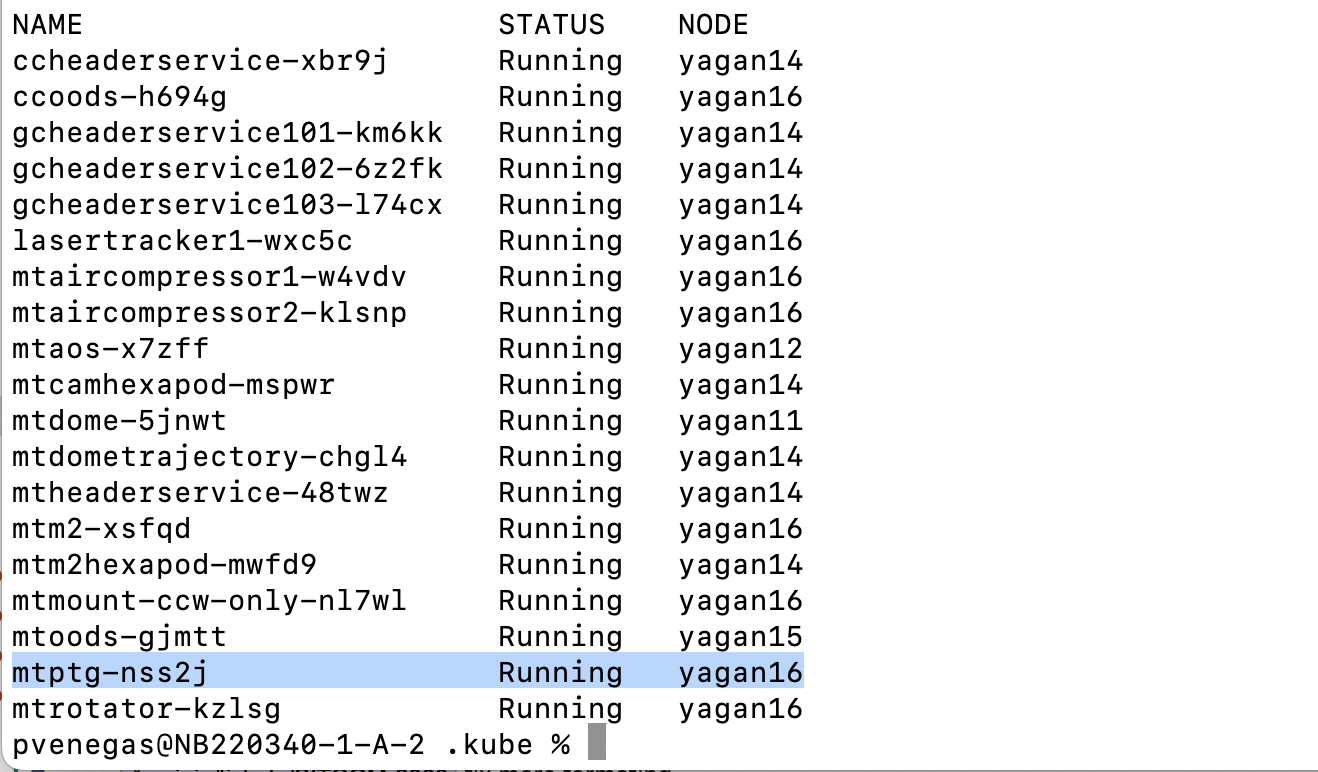
Fig3. In this particular case the name of the MTPtg pod is mtptg-nss2j, the name changed frequently, every time the CSC is restarted, (mtptg-xxxxx).¶
Connect to the MTPtg pod mtptg-nss2j within the simonyitel. The command bellow will open a terminal within the pod as saluser.
kubectl --kubeconfig=${HOME}/.kube/yagan.yaml exec --stdin --tty mtptg-nss2j -n simonyitel -- /bin/bashConfiguration directory: the configuration files are one level up.
cd /home/saluser/repos/ts_pointing_common/install/data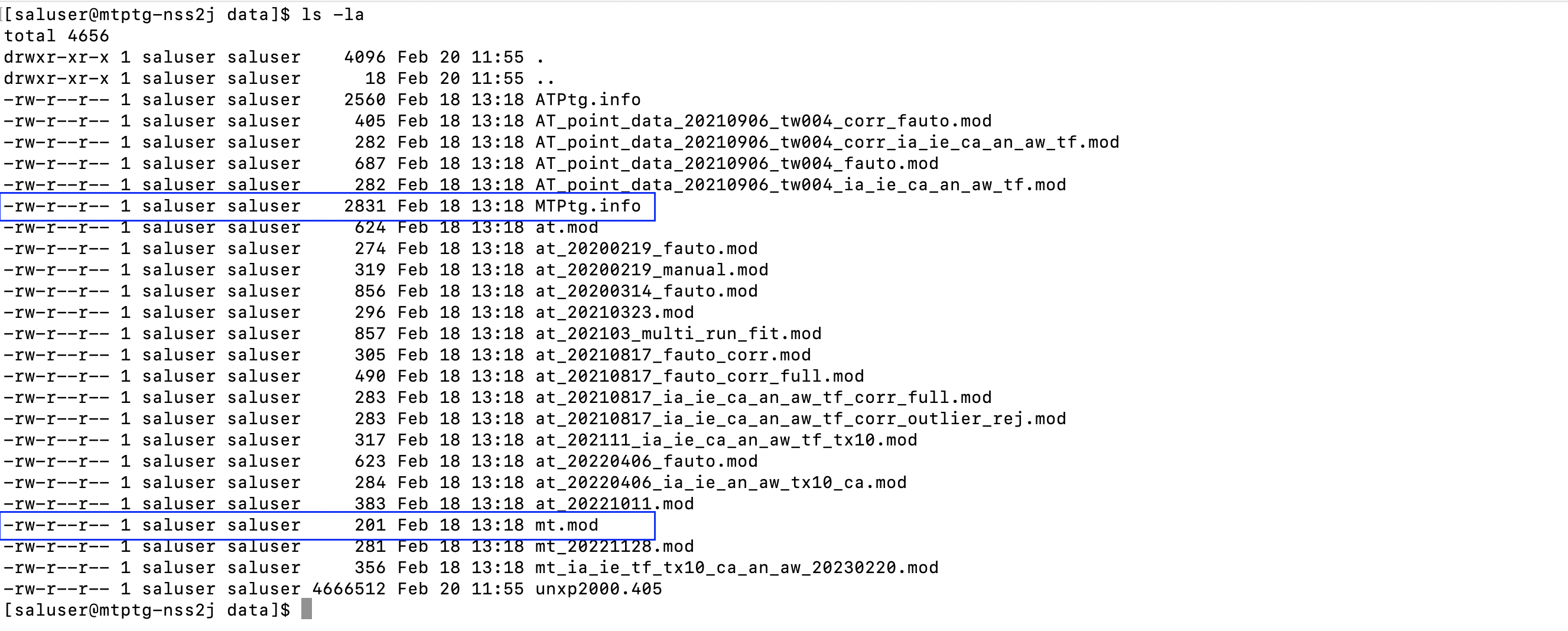
Fig4. The directory contains the configuration files
MTPtg.infoand the pointing modelsmt.modfiles.¶Note
At startup, the pointing component loads by default the pointing model that’s on the
mt.modfile and theMTPtg.info.Edit the
MTPtg.infofile, use a text editor such as vi.6.1. Edit the disable_rotator paramenter in the
MTPtg.infofile.set 1 : rotator will be ignored and will not be commanded by the MTPtg component (disabled).
set 0 : rotator will be included (enabled)
MTPtg.info / disable_rotator - Disabled example¶disable_rotator: 1
6.2. Edit The disable_mount parameter in the
MTPtg.infofile.set 1 : mount will be ignored and will not be commanded by the MTPtg component (disabled).
set 0 : mount will be included (enabled).
MTPtg.info / disable_mount - Enabled example¶disable_mount: 0
Exit the pod by typing exit.
Send the MTPtg to
ENABLEDusing the scriptset_summary_state.pyand configuration below in the MTQueue.Note: MTMount must be
ENABLED, even if not tracking, so CCW can be still monitored.set_summary_state.py¶data: - - MTPtg - ENABLED
Post-Condition¶
The tracking tests are able to run with a missing component, either MTMount or MTRotator, if the respective parameter was set to 1.
The tracking tests includes the MTMount or MTRotator, if the respective parameter was set to 0.
Once you finish with the procedure, the parameters need to be restored to their original state.
Contingency¶
If the procedure is not successful, report the issue in #summit-simonyi, inform the Commissioning Scientist on duty, and/or activate the Out of Hours Support.