MTRotator Motion Check¶
Overview¶
This procedure checks the motion of the MTRotator under nominal movements, issued independently from the LOVE/MTQueue or the MTRotator EUI.
Warning
This check cannot be accomplished if MTRotator is in FAULT on the CSC and/or with interlocks
activated on the GIS or the MTRotator EUI. Please refer to MTRotator Recovery
Procedure
to clear these warnings before proceeding.
Using the maintel/mtrotator/move_rotator.py SAL script¶
Use the following configuration to run maintel/mtrotator/move_rotator.py on the LOVE/MTQueue using the following configuration
maintel/mtrotator/move_rotator.py¶angle = < +/ - angle you want the MTRotator to move (in degrees) >
If this procedure fails, follow the next one using the MTRotator EUI.
Using the MTRotator EUI¶
MTRotator EUI Access¶
Enter the virtual machine that controls the rotator hexrot-vm02.cp.lsst.org with your IPA account credentials.
Once in the virtual machine, choose your user profile and enter your IPA password.
Open a terminal from the ‘Activities’ tab on top left -
First check that there are no processes running on the EUI by typing
ps -aux | grep "runRotEui"If processes are already running, you may need to identify who is running them and ask permission to end one (or both) so you can run your own EUI session. If another runRotEui is running then type the following to kill the existing process
sudo kill -9 {pid}Enter the runRotEui by typing
cd /rubin/rotator/build/ ./runRotEui
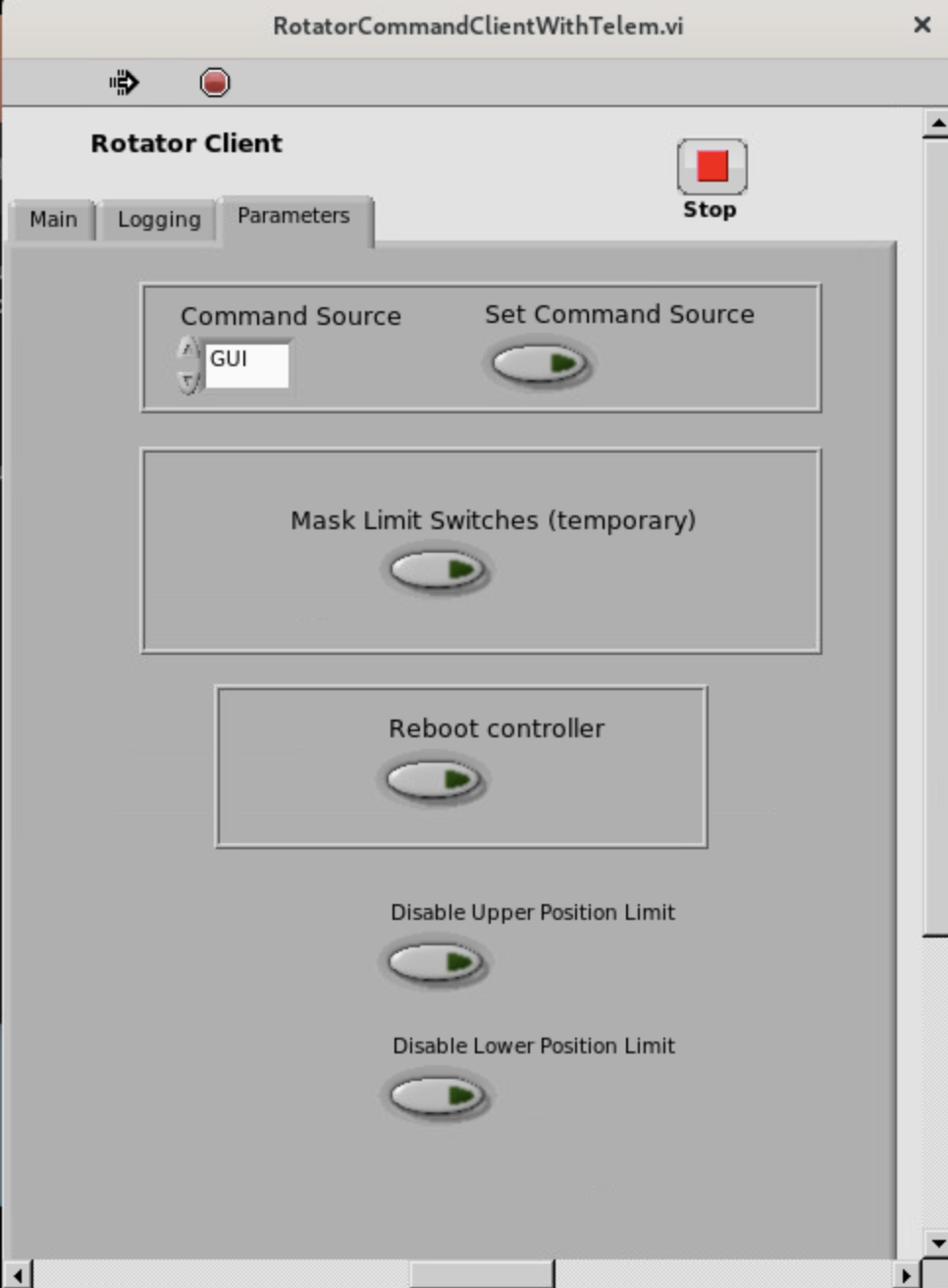
Moving the MTRotator point to point (p2p)¶
On the MTRotator Client, under the Main tab,
State Cmdis selected, StateTriggers menu showsEnableunder and then click Send Command button. This enables the MTRotator.To move the MTRotator, go to the Commands to Send section and in Enabled Substate Triggers, choose
Move. Then, input0degrees in the Position Cmd field and execute the movement by clicking on the Send Command button.If the MTRotator does not follow:
Transition to
Standbystate followed by theEnabledstate again to reset the internal calculation of Simulink model. Then, do the p2p movement to origin again.It might also be possible that some internal signals are not triggered in Simulink module. You can try to do the p2p movement to another point such as 1 or 2 degree position first. If the MTRotator moves then you could move it back to the origin.
Note
If you want to p2p move the rotator after the soak test, consider the following steps:
Issue a Stop command to MTRotator and wait for 5 min. This should make sure the internal queue of track commands from the soak test has been processed by Simulink model totally.
Check the controller State is
Enabled Stateand the Actuator Enabled Sub-Sate isStationary.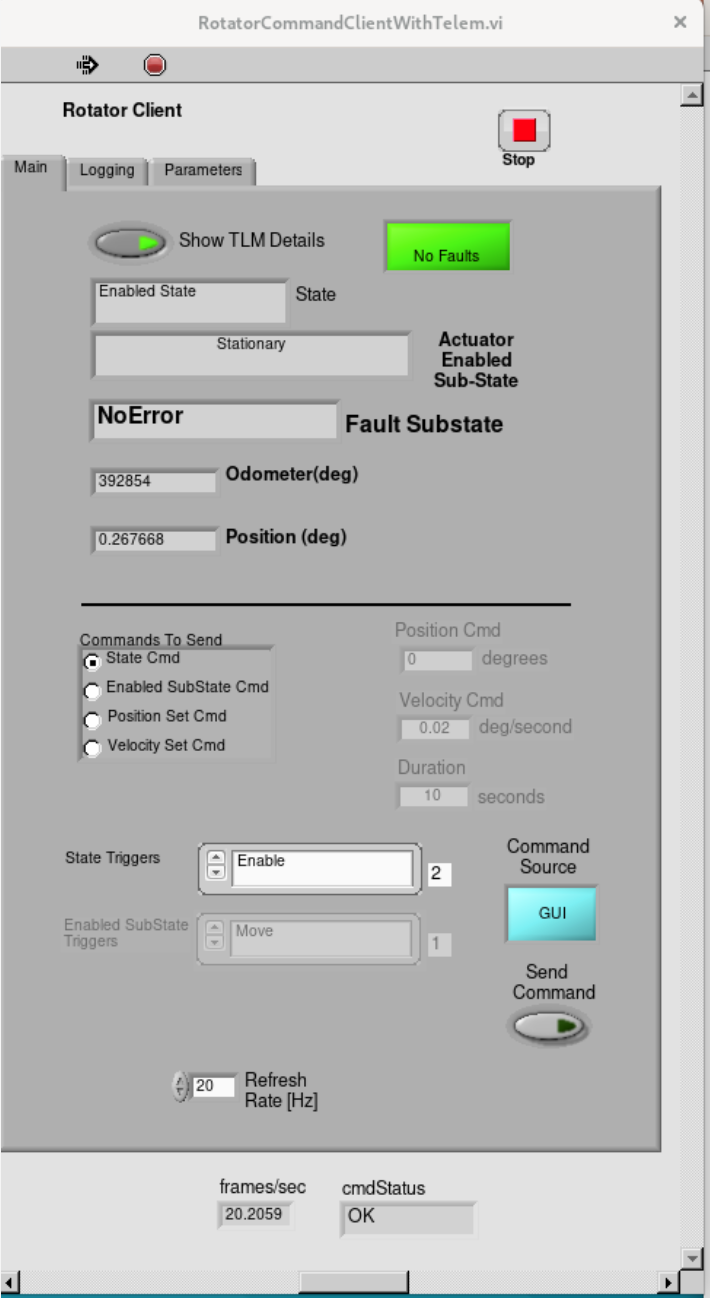
Warning
MTRotator position should always be at 0 degrees in the Standby state.
This procedure was last modified on Nov 28, 2024.